
新闻来源:发布日期:2021-11-04
感谢您选择立三机电产品,本文章针对立三通讯系列步进驱动器上位机使用进行讲解。
第二章:LEESN上位机编程详细介绍
前面文章熟悉了LEESN上位机设置,版面介绍以及驱动器寄存器详情。后面章节要详细介绍上位机编程及调试区的功能和实际编程操控等。
上位机编程及调试区功能模块:
(1)参数设置 (2)运动控制
(3)条件/信号跳转 (4)输出控制
(5)设定信号 (6)点动
(7)表格数据管理 (8)其它指令
(9)控制模式设置 (10)编程控制
(11)编程添加及下载
2.1 参数设置 如图
注:
(1)通讯失败状态下驱动器值未知,PC存值为默认值或上次有效更改数值。
(2)通讯成功状态下,上位机读取驱动器参数并显示,修改成功后上位机发送数据到指定寄存器暂存。
断电保存: 将设定的参数下载到驱动器,再次上电后参数不再变更为默认值。

2.1.1 参数修改
鼠标点击对应参数“PC存值”,弹出对话框。如果需要修改数据务必先清空数据,再用键盘或是鼠标点击输入。小数点通过键盘输入,参数设置避免负数输入。确认即可其它参数设置操作雷同。
注:无需更改的数据可以使用默认值。
参数修改
(1)细分:设定电机每转㈠圈需要的脉冲数量;
(2)串口超时:通讯反馈时间。超过设定时间没有通讯成功反馈则通讯失败。0则取消次功能;
(3)启动/停止速度:电机由静止到匀速运行和由匀速运行到停止最小运行速度;
(4)加速/减速时间:电机由静止到匀速运行和由匀速运行到停止需要的时长;
(5)运行速度:电机匀速运行时的速度;
(6)纠偏电流:闭环驱动设置。改善闭环驱动器噪声表现;
(7)电流:驱动器运行最大电流;
(8)空闲电流:开环驱动设置。.驱动在电机停机状态下电流表现;
(9)脉冲延时::电机运行平滑系数。越小电机反应越慢反之则相反;
(10)运行误差阈值和停机误差阈值:设定丢步报警步数最小值,参照200步/转(1.8°/STEP)。
2.2 运动控制
2.2.1.电机"脱机"和"使能"。"脱机"使电机松开,可以手动干预机构,不能驱动;"使能 "锁定电机,电机可以驱动。
注:驱动器通讯正常情况下,运动控制数据输入后对应电机会产生运动,为避免编程产生不必要的意外,编程调试时应使电机处于"脱机"状态.图示:

编程完成后,再次点击使能,电机锁机,可以正常驱动。

2.2.2:参数修改。下图。点击对应参数栏,弹出对话框。如果需要修改数据务必先清空数据,再用键盘或是鼠标点击输入。小数点通过键盘输入,正数表示正向运行,负数表示反向运行。确认即可其它参数设置操作雷同,图示。

(1)运行指定时长:设定电机运行多久后停机;
(2)运行指定步数:设定电机运行多少步后停机;
(3)运行到指定位置:绝对位置值,相对原点电机运行到位;
(4)设定当前值:绝对位置原点偏差补偿;
(5)运行中设定停止位置:检测到指定信号后,电机变速运行指定步数后机;
2.2.3:电机正/反向运行,立即停止和减速停止:
(1)正向运行:点击后电机正方向㈠直运行;
(2)反向运行:点击后电机反方向㈠直运行;
(3)减速停止:点击后圆形电机缓慢停止;
(4)立即停止:点击后运行电机立即停止;
2.2.4 位置控制(操控快捷键):如图
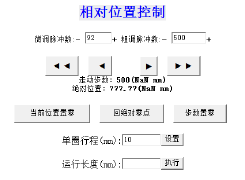
(1)相对单步运行。左边框为微调步数,右边框为粗调步数。单箭头为微调键,双箭头为粗调键,左右箭头方向指示电机反转和正转;
(2)当前位置置零:将当前位置设定为新的原点;
(3)回绝对零点:电机运行到原点位置;
(4)步数清零:上位机快捷键,对编程没有影响;
(5)单圈行程:丝杆导程,单位mm;
(6)运行长度:指令丝杆电机运行长度。
注:5-6 为丝杆电机运行数据定做,可以直接生成丝杆电机运行长度指令。
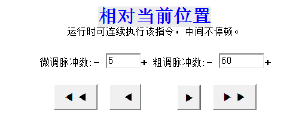
2.2.5:相对当前位置:电机运行过程中,停止在执行运动,偏移当前位置指定步数再止。下图:
左边框为微调步数,右边框为粗调步数。单箭头为微调键,双箭头为粗调键,左右箭头方向指示电机反转和正转;
2.3 条件/信号跳转
指令:跳转指令和等待指令;信号:输入IN0-IN15 一共16组
默认(IO 5进3出)IN0-IN4为信号输入端口,通讯成功时,显示端口输入情况,输入5-24V时为1,0V信号输入或悬空时显示为0;通讯不成功显示未知状态。下图:

2.3.1 输入端口寄存器地址:0x0006(十进制6)
一个16位寄存器,条件跳转/等待是通过查询指定端口状态而执行下一条指令。
IN0-IN7 8组输入状态寄存器:有信号输入为1;0V信号输入或悬空为0;
IN8-IN9组合电机转子运行状态指示:00 空闲,电机停机状态;01 即将启动进入加速状态;10 即将减速停止;11 正运行状态;
IN10:实际电机转子位置与控制指令偏差提示:1示有偏差,0示无偏差; IN11: 电机实际位置与设定值之间关系 根据设定IN11显示"1"或"0"。
2.3.2 条件跳转。
根据实际需要选择端口无输入0或是有输入1时,下一步执行跳转指定地址;
跳转地址:执行跳转指令指向位置,及下一条执行的指令;设定好后,点击”添加指令到编程区”;
2.3.3 等待指令
等待指定端口状态翻转后执行下一条指令。等待时间:等待指定时间后再执行下一条指令,等待时间"0"时一直等待直到上条指令执行完毕才执行下一条指令。
2.4 输出控制
2.4.1 打开输出: 对应寄存器:0x00A0(十进制160)内部光耦模拟常开点闭合,外围电路构成回路;
关闭输出:对应寄存器:0x00A1(十进制161)内部光耦模拟常开点恢复,外围电路断路。
可以通过“直接控制”调试端口,调试数据暂时有效但不会保存;“添加指令到编程区”可以将添加指令下载到驱动区保存并执行,图示:

通讯成功将显示当前端口状态,通过“选择”选定指定端口输出或关闭,并可以添加对应 指令到编程区。
2.5 设定信号
“设定信号”可以取消默认端口输出功能,也可以重新定义端口输出功能。
寄存器地址:0x00A5 (十进制165)

2.5.1:有效输出端口OUT0-OUT2
(1)设定报警输出:将选择端口设定为报警输出
(2)设定运行输出:将选择端口设定为报警输出
(3)设定到位输出:将选择端口设定为报警输出
当前值:当前端口输出状态: 闭合或是断开;
控制值:设定控制有效时端口闭合或断开。闭合和断开两个输出状态是互补的,如报警输出,如果设定报警发生时报警输出断开,则常规状态时报警输出是闭合的。
直接控制: 可以通过“直接控制”调试端口,调试数据暂时有效但数据不会保存;而 “添加指令到编程区”可以将添加的指令下载到驱动区保存并执行。
注:开环时,默认OUT0(Y0)为报警输出(报警时闭合);OUT1(Y1)为运行输出(运行时闭合) 。
闭环时,默认 OUT0(Y0)为报警输出(报警时闭合);OUT1(Y1)为到位输出(到位时闭合) 。 如果需要重新定义、打开或关闭OUT0 或者OUT1, 需要先取消默认输出功能。
2.6:点动
寄存器地址:0x00CA 下图:

(1)速度:点动时电机驱动速度,最大⑸⑴⑴转/分;
(2)方向:电机运行方向,默认正向运转,"反向"选择后运动方向反向;
(3)急停:停机方式是接到指令电机立即停止;默认减速停止;
(4)运行(运行/停止):选中后驱动电机运行,不选则指令电机停止;
2.7:表格数据管理
寄存器起始地址:0x00AA
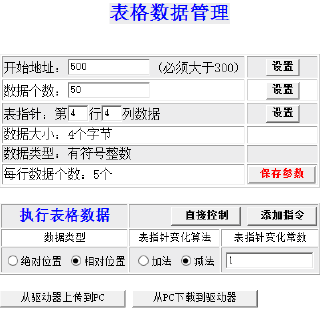
2.7.1:表格数据管理
(1)开始地址:表格数据保存的起始地址,默认⑸00,必须避开系统其它有效寄存器存储区;
(2)数据个数:需要加载的数据个数,每个个数为㈠个启动或停机位置;
(3)表指针:指向表格数据存放的首个位置,默认位置为0;
注: 填写完毕点击设置,在“最后操作编程指令区”生成对应指令,直接添加到编程区。
2.7.2:执行表格数据:表格数据设置完毕后需要设置表格数据执行设定。
(1)数据类型:绝对位置。电机驱动以原点为起始点,每次数据执行都会先回原点,然后按照表格数据驱动到位;
相对位置。电机驱动以上次停机点为起始点,每次数据执行都会在上次位置基础再次按照表格数据驱动到位;
(2)表指针变化算法:加法,表指针由最低点逐次递增;减法,表指针由高点逐次递减;
(3)表指针变化常数:指针每次指向变化的最小数。
2.7.3:数据上载和下载
添加到编程区的指令可以通过下载指令将数据下载到驱动器,也可以通过上载指令读取寄存器中已经保存的数据
2.8:其他指令
2.8.1:编程辅助指令:
(1)跳转指令:有当前位置跳转到指向位置执行新的指令;
(2)重复指令:地址:需要重复执行指令的首位值;
次数:需要重复执行指令次数
(3)延时:上条指令执行完毕后等待多久执行下㈠条指令;默认ms,最大⑷000ms;
(4)等待停止:上条指令执行多久或等待最后结果后再执行下㈠条指令。"0"时等待指令执行完毕后再执行下㈠条指令,如碰撞回原点,㈠直等到原点到位才能执行下㈠条指令,否则㈠直执行回原点指令。其他数值等同等待指令;

2.8.2:限位,原点和恒力矩模式设置:
(1)设置左右限位:寄存器地址:0x00⑼B 点击“设置左右限位”弹出对话框;

(2)启动:勾选则启用端口为限位点;
(3)检测值:检测输入端电平特性。“⑴”检测到高电平(⑸-⑵⑷V)信号有效;“0”检测到低电平0V信号有效;
(4)选择端口:选择IN0-IN15作为对应限位输入端口。可以参考寄存器设置详细说明。
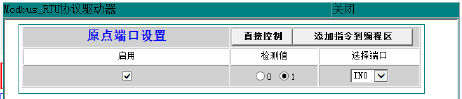
2.8.3 原点端口及回原点设置
(1)原点设置。点击原点设置,弹出对话框,操作同左右限位;
(2)回原点方式设置
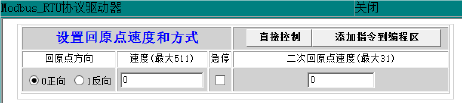
回原点方向:启动回原点指令后,电机运行方向;速度:电机执行回原点的速度;
急停:原点到位后电机急停机;二次回原点速度:原点到位再次偏移指定步数时电机运行速度;
(3)二次回原点设置

二次回原点方向:“0” 二次正向运行指定步数再次回原点;“1”二次反向运行指定步数回原点;
离开原点脉冲数:二次回原点时。偏离第一次原点指定步数后二次回到原点;
(4)恒力矩模式设置
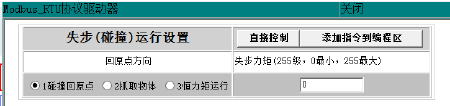
失步(碰撞)运行设置三种模式:
①碰撞回原点:无需感应开关,电机运转,通过设定力矩完成原点到位检测;
②抓取物体:以系统设定速度抓取物体,达到设定力矩时抓取状态保持;
③恒力矩运行:以系统设定最大速度运行,速度与阻力反比,阻力达到设定力矩时保持,阻力小于设定力矩时,电机继续运转失步力矩(0-255级,数值越大,力矩越大)
注:力矩模式必须是闭环驱动系列才支持。
(5)恒力矩运行设置
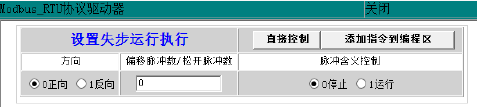
①方向:很力矩模式时电机运行方向;“0”正向运行;“⑴”反向运行。
②偏移脉冲数/松开脉冲数:碰撞回原点偏移指定脉冲作为新原点或是抓取物体后松开指定步数;
③脉冲含义控制:“0”停止执行力矩模式;“1”开始执行力矩模式;
(6)自定义通用指令:编程可以通过上位机指定按钮设置添加,也可以通过直接读/写指定寄存器值实现

①寄存器大小:单条指令;⑴⑹位寄存器指令;⑶⑵位寄存器指令;
②寄存器地址:目标寄存器地址;
③寄存器值:指定寄存器中要写入的数值;
如驱动器细分设置:
细分设置寄存器地址:0x0007;为16位寄存器;设定细分为3200,添加指令到编程

等同上位机按钮输入。

2.9 控制模式设置
4.9.1 IO控制模式:通讯系列驱动器默认控制模式,有效电平信号范围(0-24V);
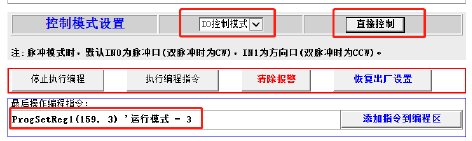
选定控制模式--点击直接控制(暂时调试,重新上电后恢复成驱动器保存模式,同时)生成指令--添加指令到编程区--下载后保存并执行。
4.9.2 双脉冲控制模式:差分(脉冲)信号有效。默认IN0正向运行端口;IN1反向运行端口;操作同4.10
4.9.3 脉冲&方向:默认IN0为脉冲驱动端口,且为正向运行端口;IN1为方向控制端口,高电平信号(5-24V)有效输入。操作同4.10.1
注:退出双脉冲或脉冲&方向模式,直接设定为IO控制模式即可。
2.10 编程操作
2.10.1 编程添加及下载

(1)停止执行编程。点击后,驱动器停止执行运行指令,并跳转到编程首位;

(2)执行编程指令。点击后,驱动器开始从编程首位执行指令;

(3)清除报警:驱动器报警状态下,清除异常,并重启动驱动器;

(4)恢复出厂设置:将驱动器指定寄存器数据更改成默认数据值。

(5)最后操作编程指令:寄存器操作后对话框会生成一条指令,可以通过“添加指令到编程区”将指令添加到编程区,并可以下载保存到驱动器。

(6)编程处理 :指令添加完成后,可以通过上/下移动,调整指令位置;删除掉不需要的指令、或是清空编程区指令;
从驱动上传程序到PC:将驱动器已下载好的程序上载到PC上位机,点击"从驱动器上传程序到PC"后刷新即可在编程区显示,可以再次编辑或是下载;
从PC下载程序到驱动:将编程区程序下载到驱动器后,点击“执行编程指令”或是驱动器重新上电,即可执行编程指令。
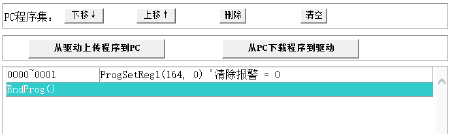
(7)控制器存储程序集:下载指令完成后,此页面将显示已经下载的程序。不可编辑
2.11 编程 *.PC文档处理
如果有现成的编程文件,不需要重新编程,可以直接拿来使用。
PC上位机最大支持64台从机,1~32从机可以通过上位机编程和控制且程序以*.PC文档格式保存,33-64节点只能通过上位机控制,不能生成编程文件保存。
打开工程文件夹,如保存成"Project1" - 打开文件夹Binr ,所有编程文件按照6.1,6.2,6.3 。。。。6.32 文件名保存。

文件名一一对应上位机状态栏从机序号,不分RTU和TCP驱动器。
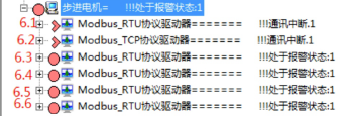
6.1.PC即对应第一个Modbus_RTU协议驱动器;6.2.PC即对应第二个Modbus_TCP协议驱动器等等。
目前处理的方式有两种:
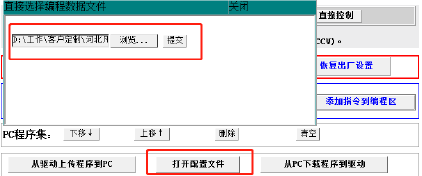
1. 直接复制替换原 *.PC文件.将目标文件修改成要替换的*.PC相同的文件名,复制到"Binr"文件夹,确认替换.回到操作界面刷新即可将程序加载到编程区;
2. 通过加载配置文件.图示,点击"打开配置文件"--"浏览..."选择指定加载*.PC文件,确认"提交"将指定程序导入到编程区。
2.12 上位机编程执行的原理及寄存器,编程区应用说明
由前面介绍可知,修改电机运行参数有直接设置和写入编程区中设置两种方式。
2.12.1 直接设置:
通过上位机、PLC或触摸屏等带有RS485通信功能的设备直接对《485通讯手册》中地址范围为0x0000~0x012B的寄存器进行修改操作,这种修改方式修改电机运行参数是立即生效的。这个修改过程可以理解为将出厂时寄存器的缺省值修改为用户所需要的值后临时保存在芯片的RAM中,修改后以RAM中的参数进行相应的动作,由于是保存在RAM中,所以不执行保存命令的话,重新上电后修改的值将丢失,电机运行参数将按照相应寄存器出厂时的缺省值进行配置。若执行了保存命令之后,RAM中的修改的寄存器的值将会更新并保存在ROM中,在下一次上电时,这些修改后的值将会变成缺省值。
2.12.2 编程区中设置:
编程区的地址是从0x12C(300)处开始的,因此编程区中的地址都需要加上300才是实际的地址。通过上位机在编程区中写入用户需要修改的参数后,需要将程序下载到驱动后重新上电才能生效,下载后程序被保存在芯片的ROM中,因此断电后不会丢失。驱动器会根据修改的参数对电机运行参数进行配置。
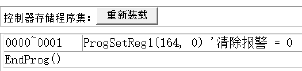
在编程区中设置了电机的运行参数后同样有两种方式去修改对应的参数,以图3为例,编程区中将电流值修改为3A,如果需要需要再次修改电流值(修改其他参数也一样),可以根据《485通讯手册》查询到电机额定电流寄存器的地址,然后往这个地址中写入需要修改的值,修改后立即生效,但是通过这种方式修改后不管有没有保存修改值,重新上电后电机的额定电流值还是3A,具体原因将在后面给出。
另外一种方式是通过修改编程区中的电流指令,图3中修改电流的指令为0x0002~0x0003,前面分析了,编程区地址是从300开始,因此编程区中修改电流的地址实际是302和303,可以把地址302理解为新的电流寄存器的地址,地址303理解为保存电流值的地址。基于此,用户可以通过修改地址303的值来实现修改电流的目的,这个修改同样是立即生效的,执行保存命令后,再次上电,电机额定电流将会是修改后的值,否则还是修改之前的值。流程下图示。
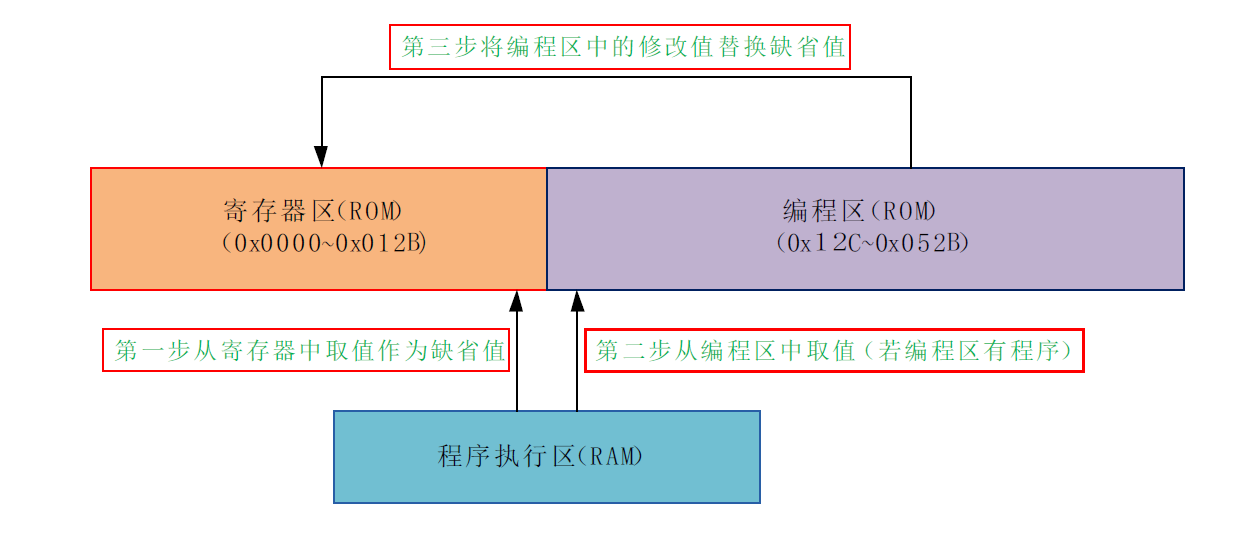
程序上电初始化时先将寄存器区中的参数作为缺省值,若编程区中没有程序,则初始化参数结束,若编程区中有程序,则会将编程区中的参数取出,并覆盖之前从寄存器中取出的值,并作为新的缺省值,因此当编程区有程序时,若是直接对寄存器区的相应寄存器值进行修改,重新上电后都会被编程区中修改的值所覆盖。直接修改寄存器值和修改编程区中指令的方式都是在程序执行区的动作,因此会立即生效。
未完待续.......
如遇其他问题,请联系我司工程师!
请升级您的浏览器:Internet Explorer11 或以下浏览器: Firefox / Chrome / 360极速浏览器
